โรงงานพลาสติกของคุณกำลังเจอปัญหามอเตอร์โหลดเกิน รอบสกรูไม่นิ่ง หรือชิ้นงานไม่ได้คุณภาพอยู่ใช่ไหม? มาดูเทคนิคระดับโลกใน การเลือกใช้มอเตอร์และชุดขับเคลื่อนให้สัมพันธ์กับรอบสกรู เพื่อความคุ้มค่าสูงสุดกันครับ!
เจาะลึกระบบขับเคลื่อนเอ็กซ์ตรูเดอร์: หน้าที่ของระบบส่งกำลังต่อความเสถียรของน้ำพลาสติกหลอมเหลว 🔬🔋
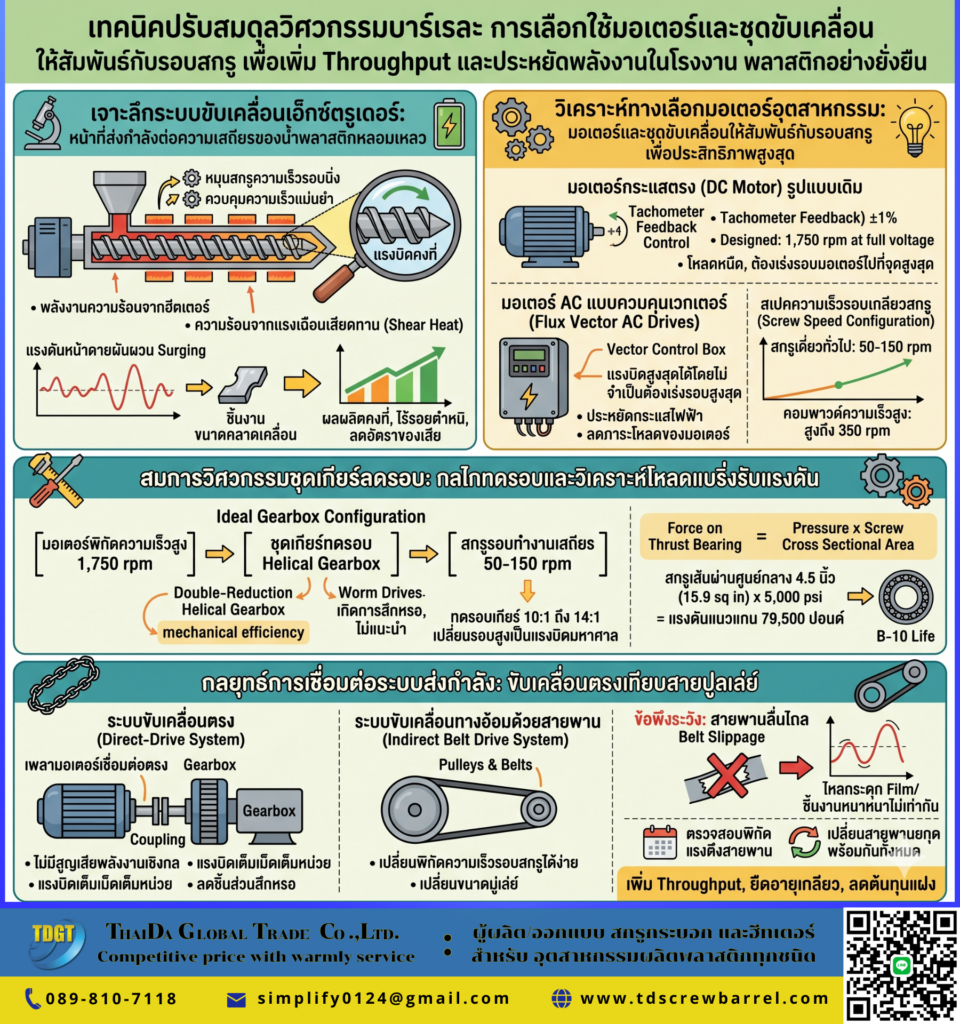
กระบวนการรีดหรือฉีดพลาสติกตามหลักวิชาการสากลจากตำราดั้งเดิมอย่างคู่มือ Extrusion_Basic_merged_compressed_9.pdf ระบุเอาไว้ชัดเจนครับว่า ระบบขับเคลื่อนของเครื่องจักร (Extruder Drive Motor) มีหน้าที่หลักในการหมุนสกรูให้ได้ความเร็วรอบที่นิ่งที่สุด ควบคุมความเร็วให้ปรับเปลี่ยนได้อย่างแม่นยำ และที่สำคัญที่สุดคือต้องสามารถรักษาแรงบิด (Torque) ให้คงที่สม่ำเสมอในทุกๆ ช่วงเวลาการทำงานครับ นอกจากนี้ พฤติกรรมการหลอมเหลวของพอลิเมอร์ภายในกระบอกสูบ ยังถูกควบคุมโดยตรงจากพลังงานความร้อนสองส่วน คือความร้อนนำไฟฟ้าจากฮีตเตอร์ภายนอก และความร้อนที่เกิดจากแรงเฉือนเสียดทาน (Shear Heat) จากการหมุนของสกรูครับ
อย่างไรก็ตาม หากการส่งกำลังของชุดขับเคลื่อนไม่มีความเสถียร จะส่งผลให้แรงดันย้อนกลับที่หน้าดายเกิดอาการผันผวนแปรปรวนในรูปของคลื่นความดัน (Surging) ครับ ปรากฏการณ์นี้จะทำให้น้ำพลาสติกหลอมเหลวไหลออกแบบขาดๆ หายๆ ส่งผลเสียโดยตรงทำให้ขนาดมิติของตัวชิ้นงานเกิดความคลาดเคลื่อนจนกลายเป็นของเสียสะสมในโรงงานพลาสติกทันทีครับ ดังนั้น การเลือกขนาดมอเตอร์และชุดขับเคลื่อนที่เหมาะสม จึงเปรียบเสมือนการสร้างหน้าต่างแห่งความเสถียรให้กับกระบวนการหลอมเหลว ทำให้ผลผลิตคงที่ ไร้รอยตำหนิ และลดอัตราของเสียได้อย่างน่าอัศจรรย์ครับ
วิเคราะห์ทางเลือกมอเตอร์อุตสาหกรรม: การเลือกใช้มอเตอร์และชุดขับเคลื่อนให้สัมพันธ์กับรอบสกรู เพื่อประสิทธิภาพสูงสุด ⚙️💡
ในการทำงานเชิงวิศวกรรมพลาสติกปัจจุบัน ยุคสมัยของระบบส่งกำลังได้เปลี่ยนผ่านนวัตกรรมไปอย่างมากครับ ตามหลักการสากลระบุว่า มอเตอร์กระแสตรง (DC Motor) รูปแบบเดิม มักจะถูกออกแบบให้ทำงานที่ความเร็วรอบสูงสุดประมาณ $1,750\text{ rpm}$ ที่แรงดันไฟฟ้าเต็มพิกัด เพื่อให้ได้แรงบิดสูงสุด นอกจากนี้ หากเกิดกรณีที่โหลดของพลาสติกหนืดขึ้น มอเตอร์จำเป็นต้องใช้แรงดันไฟฟ้ามากขึ้นเพื่อรักษารอบให้คงที่ ซึ่งระบบควบคุมความเร็วจะใช้การจับสัญญาณป้อนกลับ (Tachometer Feedback) เพื่อควบคุมความเร็วรอบให้อยู่ในเกณฑ์ผิดพลาดไม่เกิน $\pm 1\%$ ครับ
อย่างไรก็ตาม ในปัจจุบันเทคโนโลยีมอเตอร์กระแสสลับแบบควบคุมเวกเตอร์ (Flux Vector AC Drives) ได้เข้ามามีบทบาทในการขับเคลื่อนอย่างคุ้มค่ามากขึ้นครับ เพราะสามารถสร้างแรงบิดสูงสุดได้โดยไม่จำเป็นต้องเร่งรอบมอเตอร์ไปที่จุดสูงสุด ช่วยประหยัดกระแสไฟฟ้าสะสมในโรงงานได้ยอดเยี่ยมกว่าระบบขับเคลื่อนแบบเดิมอย่างชัดเจนครับ ดังนั้น การเลือกใช้มอเตอร์และชุดขับเคลื่อนให้สัมพันธ์กับรอบสกรู ผ่านระบบการคำนวณเวกเตอร์กระแสไฟฟ้าในกล่องควบคุมร่วมกับความเร็วรอบเกลียวที่เหมาะสม จึงเป็นกลยุทธ์สำคัญที่จะช่วยลดภาระโหลดของมอเตอร์ ป้องกันความเค้นแรงเฉือนสะสมในมวลพลาสติก และยกระดับขีดความสามารถการรีดพลาสติกคอมพาวด์ให้ได้ Throughput สูงสุดตามทฤษฎีวิศวกรรมสากลครับ
สมการวิศวกรรมชุดเกียร์ลดรอบ: กลไกการทดรอบเกียร์เพื่อเพิ่มแรงบิดและวิเคราะห์โหลดของแบริ่งรับแรงดัน 📐⚙️
นอกจากนี้ สิ่งที่วิศวกรโรงงานพลาสติกจะต้องคำนวณให้แม่นยำเสมอก็คือ บทบาทของชุดเกียร์ลดความเร็ว (Gearbox หรือ Speed Reducer) ครับ เนื่องจากความเร็วรอบของมอเตอร์มีพิกัดที่สูงมาก แต่รอบเกลียวสกรูเดี่ยวทั่วไปต้องการความเร็วรอบเพียง $50\text{ to }150\text{ r/min}$ เท่านั้นครับ อัตราส่วนการทดรอบเกียร์มาตรฐานทั่วไปจึงนิยมตั้งเกณฑ์การลดรอบอยู่ที่สัดส่วน $10:1$ ถึง $14:1$ เพื่อเปลี่ยนความเร็วรอบที่สูงให้กลายมาเป็นพลังแรงบิดมหาศาลในการบดขยัดพอลิเมอร์หนืดครับ
ตามคู่มือระบุว่า ชุดเกียร์ลดรอบแบบเฟืองเฉียงคู่ (Double-Reduction Helical Gearbox) คือโครงสร้างที่ดีและมีประสิทธิภาพเชิงกลสูงสุดสำหรับเครื่องรีดสกรูเดี่ยวครับ ในทางตรงกันข้าม ชุดเกียร์แบบเฟืองหนอน (Worm Drives) จะไม่มีประสิทธิภาพ สร้างความร้อนสะสมสูง และเกิดการสึกหรอที่ผิวฟันเกียร์อย่างรวดเร็วซึ่งไม่แนะนำให้ใช้ครับ อย่างไรก็ตาม แรงดันย้อนกลับที่เกิดจากการดันมวลพลาสติกหลอมเหลวผ่าน die restrictor จะสร้างแรงสะท้อนกลับในแนวแกนวิ่งตรงมาที่แบริ่งรับแรงดัน (Thrust Bearing) อย่างรุนแรงครับ นอกจากนี้ การคำนวณแรงที่กระทำต่อ Thrust Bearing สามารถพิจารณาได้จากตัวอย่างสูตรวิศวกรรมสากลดังนี้ครับ:
กลยุทธ์การเชื่อมต่อระบบส่งกำลัง: ข้อดีและข้อเสียระหว่างชุดขับเคลื่อนตรงและการใช้สายปูลเล่ย์ส่งกำลัง 🔗
นอกจากนี้ อีกหนึ่งหัวข้อที่สร้างพารามิเตอร์ความแตกต่างให้กับประสิทธิภาพการเดินเครื่องจักรคือ รูปแบบการเชื่อมต่อ (Coupling) ระหว่างตัวมอเตอร์ขับเคลื่อนกับกล่องเกียร์ทดรอบครับ ตามข้อมูลทางวิศวกรรมปฏิบัติการระบุว่า โครงสร้างระบบขับเคลื่อนจะสามารถเลือกแบ่งออกเป็น 2 รูปแบบหลักๆ ดังนี้ครับ
- ระบบขับเคลื่อนตรง (Direct-Drive System): เป็นระบบที่เพลามอเตอร์เชื่อมต่อเข้ากับชุดเกียร์ลดรอบโดยตรงผ่านยอยส่งกำลัง ข้อดีคือไม่มีการสูญเสียพลังงานเชิงกล ได้แรงบิดที่เต็มเม็ดเต็มหน่วย และลดชิ้นส่วนสึกหรอได้ดีเยี่ยมครับ
- ระบบขับเคลื่อนทางอ้อมด้วยสายพาน (Indirect Belt Drive System): เป็นระบบที่ใช้ล้อสายพานและมู่เล่ย์ (Pulleys & Belts) ในการส่งกำลังเชื่อมต่อ ข้อดีคือมีความยืดหยุ่นสูง ลูกค้าสามารถเปลี่ยนพิกัดความเร็วรอบสกรูได้ง่ายๆ เพียงแค่ถอดเปลี่ยนขนาดของมู่เล่ย์บนกล่องเกียร์เพื่อปรับสเปคแรงบิดให้สอดคล้องกับวัตถุดิบพลาสติกที่หลากหลายครับ
อย่างไรก็ตาม ข้อพึงระวังของระบบสายพานขับเคลื่อนทางอ้อมคือ อาการสายพานลื่นไถล (Belt Slippage) ซึ่งมักเกิดขึ้นเมื่อใช้งานไปนานๆ จนสายพานเสื่อมสภาพ ปัญหานี้จะทำให้รอบเกลียวสกรูเกิดอาการวูบแกว่ง ส่งผลให้น้ำพลาสติกหลอมเหลวไหลกระตุกจนฟิล์มหรือชิ้นงานพลาสติกบางหนาไม่เท่ากันครับ ดังนั้น การตรวจสอบพิกัดแรงตึงสายพานเป็นประจำทุกเดือน การเลือกเปลี่ยนสายพานยกชุดพร้อมกันทั้งหมด[cite: 2] และความเข้าใจในกลยุทธ์ การเลือกใช้มอเตอร์และชุดขับเคลื่อนให้สัมพันธ์กับรอบสกรู จะช่วยให้โรงงานของลูกค้าควบคุมต้นทุนแฝงจากการซ่อมบำรุง ยืดอายุเกลียวบาร์เรลให้ทนทานสะอาดใส ไร้เจลตำหนิ และสร้างผลลัพธ์การผลิตที่นิ่งเงียบทรงพลังระดับพรีเมียมได้อย่างถาวรครับ
หากโรงงานของลูกค้าต้องการยกระดับกำลังการผลิตพลาสติก ขจัดปัญหารอบสกรูแกว่ง มอเตอร์ร้อนจัด หรือต้องการคำนวณและปรับเปลี่ยนสเปคชุดเกียร์ มอเตอร์ขับเคลื่อน รวมถึงชุดสกรูบาร์เรลและฮีตเตอร์ระบบความร้อนให้แมตช์สัมพันธ์กันอย่างสมบูรณ์แบบ สามารถติดต่อทีมวิศวกรผู้เชี่ยวชาญระดับโลกของเราเข้ามาช่วยวิเคราะห์ ออกแบบ และคำนวณค่าแรงบิดหน้างานให้ลูกค้าได้เลยนะครับ เราพร้อมยืนหยัดเป็นคู่คิดพันธมิตรวิศวกรรมเพื่อช่วยลีนต้นทุนและปั๊มผลกำไรให้โรงงานของลูกค้าเติบโตอย่างมั่นคงไปด้วยกันครับ!